元々ソフトウェアはどれ1つ習得していた訳では無く、概略だけで来たのでIoT、AIの深い所でつまずいています。
一気に参考書を読んだ所で習得出来るのでは無いですが、もう少し基礎的な部分に時間を割かないとだんだん難しくなって来ました。
講習では話しの内容は理解出来てついていけています。コードを読む癖をつけないとダメです。分かったつもりが一番いけない。
仕事中に読書が出来ないので何か方法を考えないと行けません。
もちろん自宅や移動中にと読むのですが、頭の切り替えが出来ません。電話や懸案事項を抱えると出来ない性格なので本当に難しいです。
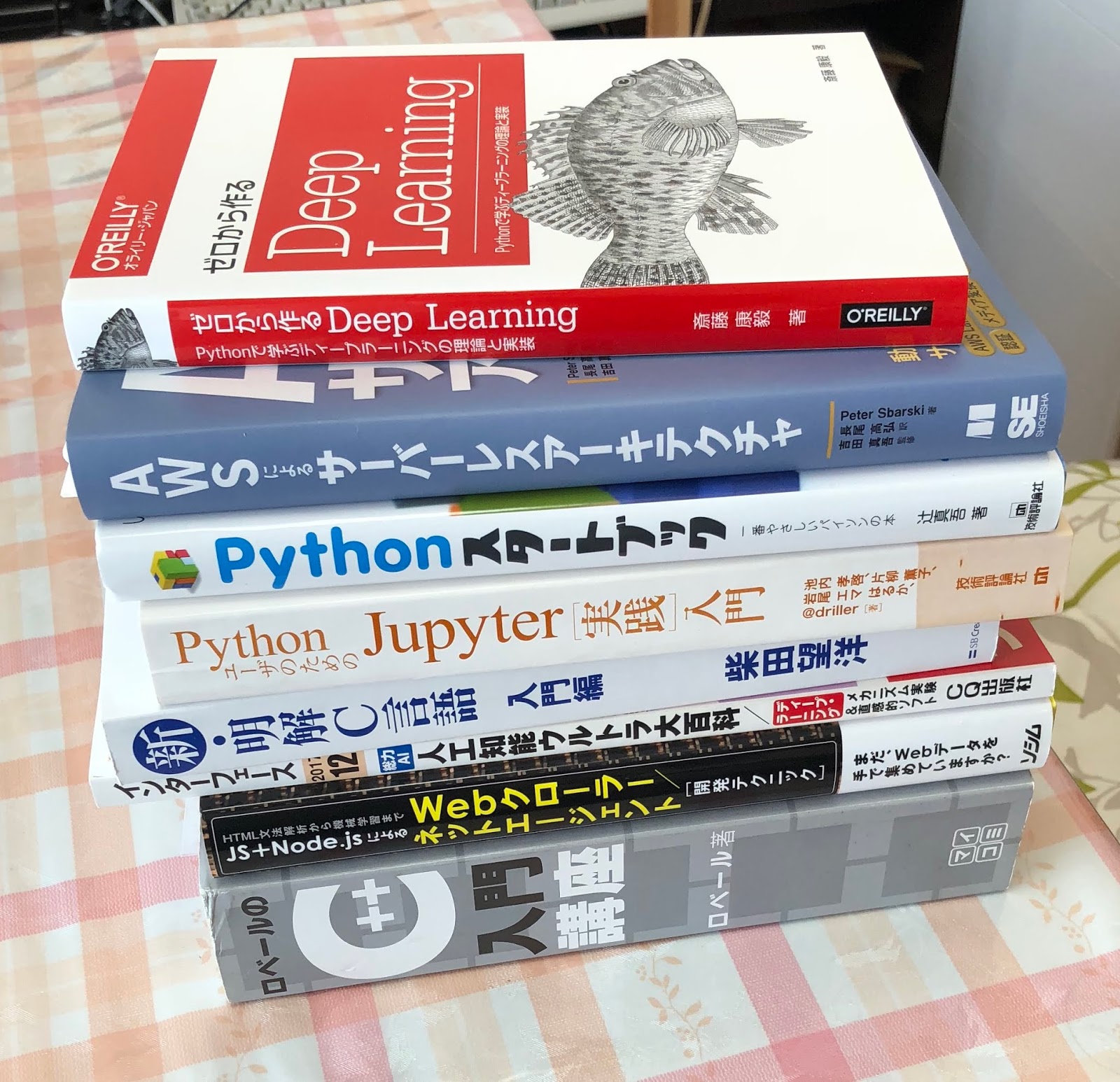
何に一番時間を割きたいかと言うとC言語(C++やC#含む)はパソコンと参考書があれば出来ます。これが一番プログラムの原点でその他の言語にも応用が効きます。
配列やポインタの扱い方を一からやり直し。
結局は平行して色々する事になるのですが、読んで実行して理解するといった感じ。
読書するだけなら学生の時するべきだったのでしょうが…
年のせいか読んでも頭に入らない…
すでにPython、ruby、Linux、JavaScript、Matlab、Unity、Vim等使う言語が増えて基板の回路を調べたり設計の為にEagleやKicadも3Dソフトも慣れないといけないし


OpenCV,OpenMV, YoloやTensor Flowの機械学習のフレームワークやライブラリー、偏微分、線形代数(行列)、ベクトル、ベイズ理論と統計学、カルマンフィルター、クオータ二オン(四元数=位置推定の為の角度センサー、角速度の扱い)…


一気に参考書を読んだ所で習得出来るのでは無いですが、もう少し基礎的な部分に時間を割かないとだんだん難しくなって来ました。
講習では話しの内容は理解出来てついていけています。コードを読む癖をつけないとダメです。分かったつもりが一番いけない。
仕事中に読書が出来ないので何か方法を考えないと行けません。
もちろん自宅や移動中にと読むのですが、頭の切り替えが出来ません。電話や懸案事項を抱えると出来ない性格なので本当に難しいです。
何に一番時間を割きたいかと言うとC言語(C++やC#含む)はパソコンと参考書があれば出来ます。これが一番プログラムの原点でその他の言語にも応用が効きます。
配列やポインタの扱い方を一からやり直し。
結局は平行して色々する事になるのですが、読んで実行して理解するといった感じ。
読書するだけなら学生の時するべきだったのでしょうが…
年のせいか読んでも頭に入らない…
すでにPython、ruby、Linux、JavaScript、Matlab、Unity、Vim等使う言語が増えて基板の回路を調べたり設計の為にEagleやKicadも3Dソフトも慣れないといけないし







OpenCV,OpenMV, YoloやTensor Flowの機械学習のフレームワークやライブラリー、偏微分、線形代数(行列)、ベクトル、ベイズ理論と統計学、カルマンフィルター、クオータ二オン(四元数=位置推定の為の角度センサー、角速度の扱い)…

昨年9月から駆け足で斜め読みと必要な部分の実践をして来ましたが、もう少し深く理解しないといけないと感じています。今実践で失敗している部分は中途半端な理解のせいの様に思います。
流石に小野さんも疲れて来ています。7月、8月はスピードを今までの3分の一以下にします。それ以上出来ないといった方がわかりやすい状態です。
なかなか効率良くは行きません。





























{kind=link}