現在使用中のLEPTONというサーモグラフィーセンサーは最大データ転送が8.9FPS(フレームレート)つまり1秒間に8枚程度(通常普通の動画カメラは30-60FPS)。
サーモグラフィーセンサーの位置を急に動かすと俗に言う”手振れ”がおきます。
なので昨年からジンバルという画像を安定させる機構を試行錯誤中。
3軸センサー(英語: inertial measurement unit、略称:IMU)を使ってアクチュエーター(モーター等)を動かします。
3軸とはx軸(ロール)y軸(ピッチ)とz軸(ヨー)です。
今回軽量化の為ヨーは使いません。
もう少し分かりやすくカメラで説明するとカメラを左右の傾きがロール、カメラの上下の傾きがピッチ、因みに今回使わないのはカメラ左右の回転(ヨー)。
前回説明したセンサーの動きはAI、3次元データとロボティクスを見てください。
 昨年夏より小型のドローンに搭載可能な様にサーボモーターを使ったジンバルは完成したのですが、ドローンのモーターの出力が上がるとその磁界で誤動作を止める事が出来なかったので。原因は恐らくサーボモーター内部のPWMドライバーのノイズ?対策は半年続けましたが改善せず。
昨年夏より小型のドローンに搭載可能な様にサーボモーターを使ったジンバルは完成したのですが、ドローンのモーターの出力が上がるとその磁界で誤動作を止める事が出来なかったので。原因は恐らくサーボモーター内部のPWMドライバーのノイズ?対策は半年続けましたが改善せず。
 今回はブラシレスモーターを使ったジンバルに挑戦中。
今回はブラシレスモーターを使ったジンバルに挑戦中。
重量がどうしても重くなります。現状バッテリーを含まず100g。
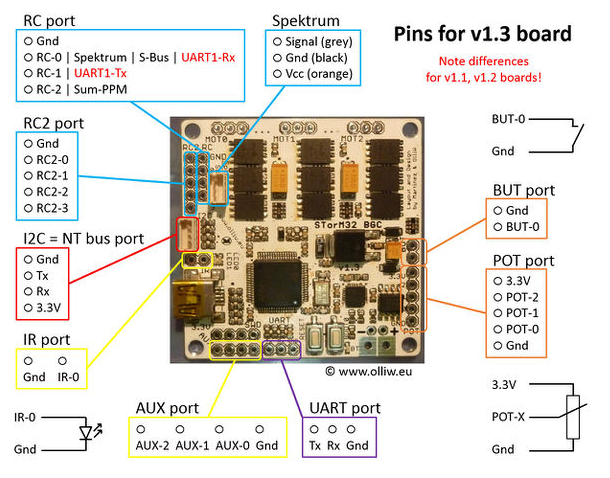
 オープンソース(ボランティアで作った)ソフトで細かな設定や改造も可能な反面、設定が大変また数週間の時間が掛かりそう…
オープンソース(ボランティアで作った)ソフトで細かな設定や改造も可能な反面、設定が大変また数週間の時間が掛かりそう…
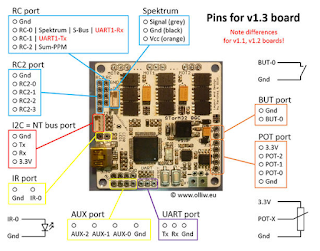


3Dプリンターとモーターを極力軽いモデルに変更しようと思います。
動けばこんな感じ。
サーモグラフィーセンサーの位置を急に動かすと俗に言う”手振れ”がおきます。
なので昨年からジンバルという画像を安定させる機構を試行錯誤中。
3軸センサー(英語: inertial measurement unit、略称:IMU)を使ってアクチュエーター(モーター等)を動かします。
3軸とはx軸(ロール)y軸(ピッチ)とz軸(ヨー)です。
今回軽量化の為ヨーは使いません。
もう少し分かりやすくカメラで説明するとカメラを左右の傾きがロール、カメラの上下の傾きがピッチ、因みに今回使わないのはカメラ左右の回転(ヨー)。
前回説明したセンサーの動きはAI、3次元データとロボティクスを見てください。


重量がどうしても重くなります。現状バッテリーを含まず100g。



0 件のコメント:
コメントを投稿